gpxファイルはGPSロガーが出力するファイル形式です。MATLABで読めるのでメモをしておきます。 gpxreadやgeoshowはMapping Toolboxが必要です。
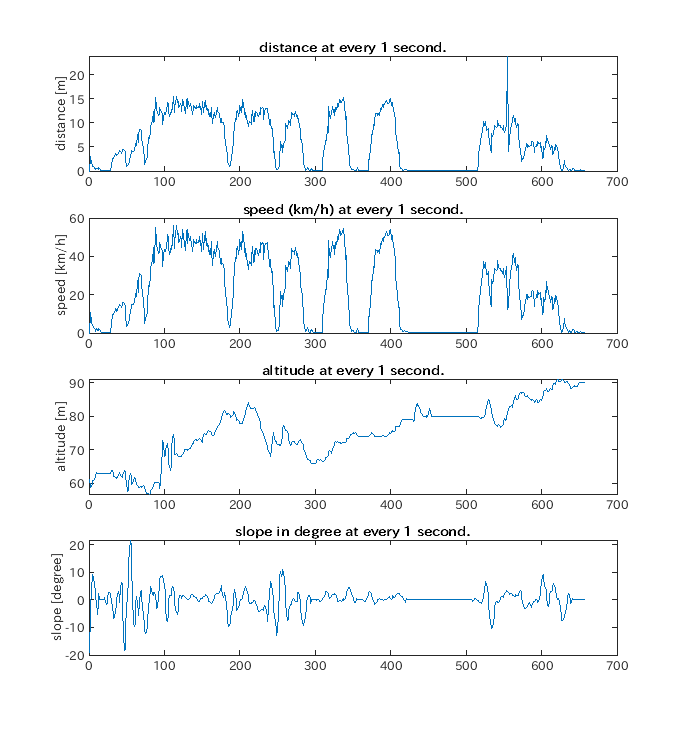
ここでは各時刻での移動距離(m)、速度(km/h)、標高(m)、勾配(degree)を計算しています。
勾配も計算していますが、誤差が大きいようです(そもそもGPSの標高データ(Elevation)の誤差が大きい)。 asinで計算していますので、引数が1を超えると複素数を返してきておかしくなります(期待しているものと違う値が返ってくる)。 そこで苦肉の策ですがスムージングをしています。 スムージングのパラメタはあくまでご参考程度です。
% gpxreadにはMapping Toolboxが必要 % Calculate disntace, velocity, and slope from gps data. %% Read gpx file %gps = gpxread('2020-05-08-18-24-51.gpx'); gpxFile = '2020-05-08-19-01-02.gpx'; g = gpxread(gpxFile); lat = g.Latitude; lon = g.Longitude; alt = g.Elevation; gps = struct; %% Store altitude altS = smooth(alt, 10, 'sgolay', 5); gps.altitude = altS; % 表示 geoshow(lat, lon, 'DisplayType','line', 'Color', 'red'); grid on; %% Format time data % GPSデータの時間列は次のような形式(ISO 8601): '2020-05-08T09:24:57.000Z' % Tは日時と時刻を分ける % ZはUTCを意味する(TZが違えば例えば +09:00 などになる。 % time = g.Time; timefmt = 'yyyy-MM-dd''T''HH:mm:ss.SSS''Z'''; tt = datetime(time , 'InputFormat', timefmt); gps.time = tt - tt(1); %% Caclulate distance and velocity % 楕円体はWGS84を選択する ellipsoid = wgs84Ellipsoid; d = double.empty(length(g) , 0); % distance t = double.empty(length(g) , 0); % time interval v = double.empty(length(g) , 0); % velocity a = double.empty(length(g) , 0); % altitude difference s = double.empty(length(g) , 0); % slope in degree % 原点はゼロにしておく d(1, 1) = 0.0; t(1, 1) = 1.0; v(1, 1) = 0.0; a(1, 1) = 0.0; s(1, 1) = 0.0; for i = 1:(length(g)-1) d(i+1, 1) = distance(lat(i), lon(i), lat(i+1), lon(i+1), ellipsoid); t(i+1, 1) = seconds(tt(i+1) - tt(i)); a(i+1, 1) = altS(i+1) - altS(i); end gps.distance = d; % v = d ./ t * 3600 / 1e3; % m/s to km/h. gps.velocity = v; %% Calculation of slope dS = smooth(d(:,1), 10, 'sgolay', 5); % smooth distnace id= find(dS > 1); % index of non-zero d. for i = id % s(i, 1) = rad2deg(asin( a(i, 1) ./ d(i, 1) )); s(i, 1) = ( a(i, 1) ./ dS(i, 1) ); end %%% Smooth the slope ss = smooth(s(:,1), 20, 'sgolay', 5 ); ss = asin(ss); % in radian. ss = rad2deg(ss); % convert to degree. gps.slope = ss; %% Save gps data. save("gpsData.mat", 'gps'); %% Show data in Figure figure ax1 = subplot(4, 1, 1); plot(d) ylabel("distance [m]") title("distance at every 1 second.") ax2 = subplot(4, 1, 2); plot(v) ylabel("speed [km/h]") title("speed (km/h) at every 1 second.") ax3 = subplot(4, 1, 3); plot(altS) ylabel("altitude [m]") title("altitude at every 1 second.") ax4 = subplot(4, 1, 4); plot(ss) ylabel("slope [degree]") title("slope in degree at every 1 second.") linkaxes([ ax1, ax2, ax3, ax4], 'x') savefig("gpsData.fig")